 元器件产品及解决方案
> 产品中心
> 控制机器首页
> 工业控制
> FA・一般产业用电机
> AC伺服
> MINAS A7B 系列 伺服驱动器
> 规格
元器件产品及解决方案
> 产品中心
> 控制机器首页
> 工业控制
> FA・一般产业用电机
> AC伺服
> MINAS A7B 系列 伺服驱动器
> 规格

MINAS A7B 系列 伺服驱动器
驱动器通用规格
基本规格
| 项目 | 性能 | |||
|---|---|---|---|---|
| 输入 功率 | 100 V 系列 | 主电路电源 | 单相 100~120 V, -15 %~+10 %, 50/60 Hz | |
| 控制电路电源 | 单相 100~120 V, -15 %~+10 %, 50/60 Hz | |||
| 200 V 系列 | 主电路 电源 | A 帧 ~ D 帧 | 单相/三相 200 ~ 240 V, -15 % ~ +10 %, 50/60 Hz | |
| 控制电路 电源 | A 帧 ~ D 帧 | 单相 200~240 V, -15 %~+10 %, 50/60 Hz | ||
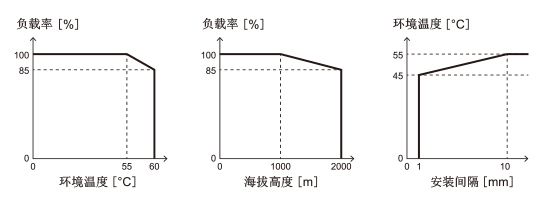
| 环境条件 | 温度 | 使用温度 0~60 °C, (55~60°C时可减额定值使用)(无冻结) 保存温度 -20~65 ℃, (最高温度保证:80 ℃、72 小时、无结露*1) | ||
| 湿度 | 使用,保存湿度 20~85 %RH 以下(无结露*1) | |||
| 海拔 | 海拔 2000 m 以下(1000 ~ 2000 m时可减额定值使用) | |||
| 振动 | 5.88 m/s2 以下,10~60 Hz | |||
| 污损度 | 污损度 2 | |||
| 安装间隔 | 10 mm以上(1~10 mm 时降低额定可使用*2) | |||
| 保护等级 | IP00 | |||
| 绝缘耐压 | 一次一地线之间 AC1500 V 时能耐1分钟。 | |||
| 控制方式 | IGBT PWM 方式正弦波驱动 | |||
| 编码器反馈 | 27 bit (134217728 分辨率 ) 7线串行绝对式编码器 | |||
| 外部位移传感器反馈*3 | A/B 相·原点信号差分输入型 松下串行通信型*4 | |||
| 控制信号 | 输入 | 通用输入8个 根据参数选择通用输入功能 | ||
| 输出 | 通用输出3个 根据参数选择通用输入功能 | |||
| 模拟信号 | 输入 | 输入1个(16 bit A/D 输入)*5 | ||
| 输出 | 输出2个(模拟监视器1、模拟监视器2) | |||
| 脉冲信号 | A/B 相位输出 (输出2个) | 编码器反馈脉冲(A·B相)通过长线驱动器输出 | ||
| 位置 比较输出 (输出3个) | 当实际位置经过参数设定的位置时, 规定的脉冲信号通过长线驱动器输出。 | |||
| 通信功能 | EtherCAT | 可实时地进行动作指令的传输、参数的设定、状态监视器等。 | ||
| USB | 可连接电脑等进行参数设定以及状态监视等。 | |||
| 安全功能*3 | Safe Torque Off(STO) 输入2个(安全输入1、2) 输出1个(EDM 输出) | |||
| 前面板 | (1) 旋转开关 (2)LED 7段2位数和状态显示用4灯 (3)模拟监视器用连接器 | |||
| 再生 | A, B 型:无内置再生电阻(仅外置) C, D 型:内置再生电阻(可外置) | |||
| 动态制动器 | A ~ D 型:内置 | |||
| 控制模式 | 位置控制:Profile位置控制(pp)、Cycilc位置控制(csp)、原点复归位置控制(hm) 速度控制:Profile速度控制(pv)、Cycilc速度控制(csv) 转矩控制:Profile控制(tq)、Cycilc控制(cst) 上述控制模式可通过EtherCAT通信命令切换 | |||
*1 请注意,温度降低时湿度上升,容易产生结露。
*2 在环境温度为 55-60 ℃ 或海拔为 1000-2000 米的环境中使用伺服驱动器时,请使用右图所示的负载率乘以相应的负载率。 使用安装间隔为 1 至 10 mm 的伺服驱动器时,请参考右图所示的环境温度。
*3 不适用于标准型。
*4 关于对应外部位移传感器的制造商以及产品型号请参考合作商目录。
*5 仅适用于特殊功能型。
功能
| 模式 | 项目 | 性能 |
|---|---|---|
| 位置控制 | 控制输入 | 正方向驱动禁止、反方向驱动禁止、锁定信号、近原点等 |
| 控制输出 | 定位结束等 | |
| 指令输入 | 根据EtherCAT的指令型(可使用平滑滤波器) | |
| 基本功能 | 旋转方向设定、指令输入、电子齿轮、电机可动范围设定、再生电阻设定、绝对式设定、外部位移传感器类型选择、2自由度控制 | |
| 调试功能 | 实时自动调整、自适应滤波器、增益切换、第3增益切换、陷波滤波器、振动抑制、模型制振滤波器、速度前馈、转矩前馈、负载变动抑制、摩擦转矩补偿、2 段转矩滤波器、象限突起抑制、位置指令滤波器、高响应电流控制、齿隙补偿 | |
| 应用功能 | 脉冲再生、减速停止、驱动禁止输入(POT、NOT)时减速停止、伺服使能开启时减速停止、主电源关闭时减速停止、报警时减速停止、报警时立即停止、报警时落下防止、伺服使能开启时落下防止、降额、转矩限制切换、转矩饱和保护、位置比较输出、 单圈旋转绝对式、多圈旋转绝对式、半闭环控制时外部位移传感器位置信息监视、Slow Stop | |
| 速度控制 | 控制输入 | 正方向驱动禁止、反方向驱动禁止、锁定信号等 |
| 控制输出 | 速度到达、速度一致等 | |
| 指令输入 | 根据EtherCAT的指令型 | |
| 基本功能 | 旋转方向设定、指令输入、电子齿轮、再生电阻设定、绝对式设定、2自由度控制、外部位移传感器类型选择 | |
| 调试功能 | 实时自动调整、自适应滤波器、增益切换、陷波滤波器、转矩前馈、负载变动抑制、摩擦转矩补偿、2 段转矩滤波器、速度指令加减速设定、高响应电流控制 | |
| 应用功能 | 脉冲再生、减速停止、驱动禁止输入(POT、NOT)时减速停止、伺服使能开启时减速停止、主电源关闭时减速停止、报警时减速停止、报警时立即停止、报警时落下防止、伺服使能开启时落下防止、降额、转矩限制切换、转矩饱和保护、位置比较输出、 单圈旋转绝对式、多圈旋转绝对式、半闭环控制时外部位移传感器位置信息监视、Slow Stop | |
| 转矩控制 | 控制输出 | 速度到达等 |
| 控制输入 | 正方向驱动禁止、反方向驱动禁止、锁定信号等 | |
| 指令入力 | 根据EtherCAT的指令型 | |
| 基本功能 | 旋转方向设定、指令输入、电子齿轮、再生电阻设定、绝对式设定、外部位移传感器类型选择、2自由度控制、速度限制 | |
| 调试功能 | 实时自动调整、增益切换、陷波滤波器、2 段转矩滤波器、高响应电流控制、转矩前馈、摩擦转矩补偿 | |
| 应用功能 | 脉冲再生、减速停止、驱动禁止输出(POT、 NOT)时减速停止、伺服使能开启时减速停止、主电源关闭时减速停止、报警时减速停止、报警时立即停止、报警时落下防止、伺服使能开启时落下防止、降额、转矩限制切换、位置比较输出、 单圈旋转绝对式、多圈旋转绝对式、半闭环控制时外部位移传感器位置信息监视、Slow Stop | |
| 全闭环控制 | 控制输入 | 正方向驱动禁止、反方向驱动禁止、锁定信号、近原点等 |
| 控制输出 | 位置结束、速度到达输出、速度一致输出等 | |
| 指令输入 | 根据EtherCAT的指令型(可使用平滑滤波器) | |
| 基本功能 | 旋转方向设定、指令输入、电子齿轮、电机可动范围设定、再生电阻设定、外部位移传感器类型选择、2自由度控制、外部位移传感器分频比设定、混合偏差过大设定 | |
| 调试功能 | 实时自动调整、自适应滤波器、增益切换、第3增益切换、陷波滤波器、振动抑制、速度前馈、转矩前馈、负载变动抑制、摩擦转矩补偿、混合振动抑制、2 段转矩滤波器、象限突起抑制、位置指令滤波器、高响应电流控制、齿隙补偿 | |
| 应用功能 | 脉冲再生、减速停止、驱动禁止输入(POT、NOT)时减速停止、伺服使能开启时减速停止、主电源关闭时减速停止、报警时减速停止、报警时立即停止、报警时落下防止、伺服使能开启时落下防止、降额、转矩限制切换、转矩饱和保护、位置比较输出、半闭环控制时外部位移传感器位置信息监视 | |
| 共通 | 安全功能 | STO |
| 保护功能 | 保护停止、警告、时间戳 |
※ 有关各功能名称的说明 (功能用语说明) ,请参照产品手册。
※ 可能会有尺寸变更的情况,如果用于设计的,请咨询确切尺寸。

-
400-920-9200【手机OK】

电话咨询
控制机器产品技术支持
400-920-9200
【手机OK】
受理时间 9:00 - 17:00
(11:30-13:00、本公司休息日除外)
下载
安装调试软件「PANATERM Ver.7」
(AC伺服电机)
MINAS A7/E7/A6 专用
 * A6系列中部分产品不支持
* A6系列中部分产品不支持
安装调试软件「PANATERM」(AC伺服电机) MINAS A6/A5专用
 * 无法在A4家族的驱动器 (型号 M*DDT****) 上使用。请购买可选件 DV0P4460。
* 无法在A4家族的驱动器 (型号 M*DDT****) 上使用。请购买可选件 DV0P4460。
